
淺談全位置焊中自動焊接設(shè)備的應(yīng)用
1 全位置焊中自動焊接設(shè)備的結(jié)構(gòu)和應(yīng)用特點
1.1 整體結(jié)構(gòu)
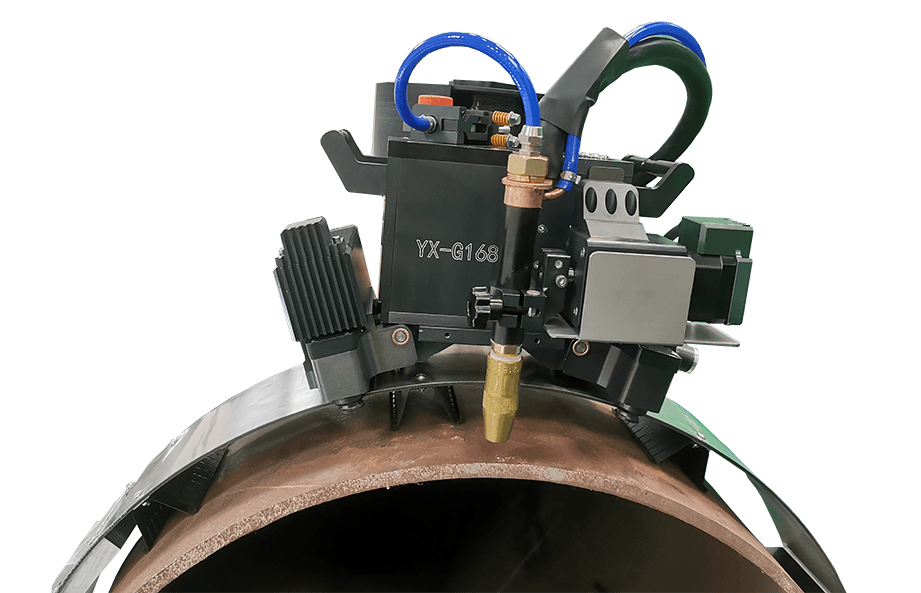
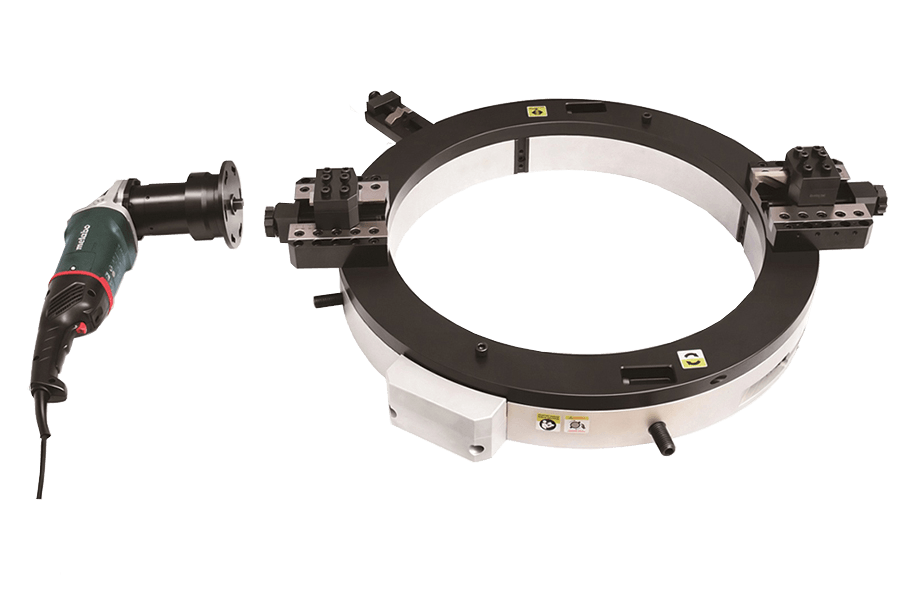
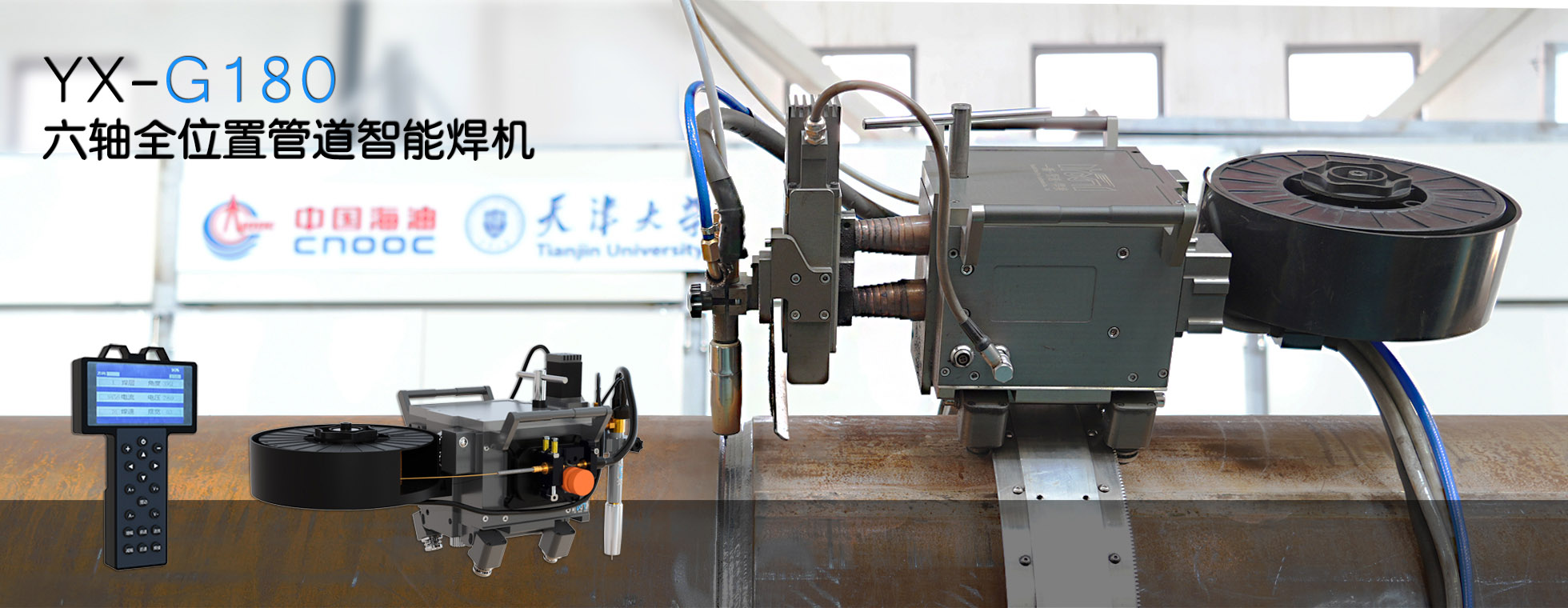
自動焊接設(shè)備的構(gòu)成主要包括幾個主要部分,分別為焊接機頭、行走環(huán)、導(dǎo)軌、控制系統(tǒng),這些部分按照從上到下的順序構(gòu)成一個整體。
1.2 控制系統(tǒng)
控制系統(tǒng)由微型計算機和控制箱構(gòu)成,計算機也可以是筆記本電腦,主要包括幾個重要的組成部分,分別為主機、鍵盤、顯示器、輸入設(shè)備以及輸出設(shè)備等。控制箱的構(gòu)成包括輸出接口電路、功率驅(qū)動電路以及控制焊槍的控制系統(tǒng)等。
1.3 焊接作業(yè)方式
基于焊接位置的固定程度較高,所以生產(chǎn)方式相對簡單,通常是采用管道對接焊的專用自動焊設(shè)備,易于操作的功能較為單一,只能夠進行自動焊接操作。
1.4 焊接電弧
進行國內(nèi)管道焊接的全位置自動焊設(shè)備、國外全自動焊設(shè)備所配置的弧焊電源和焊接機頭之間是從屬關(guān)系。能夠?qū)崿F(xiàn)焊接工藝參數(shù)控制的旋鈕、按鈕都集中在控制盒或者焊接機頭的位置,在旋鈕、按鍵的操作過程中,實現(xiàn)工藝參數(shù)的改變,所以弧焊電源基本上都是專屬應(yīng)用的。
1.5 成熟的焊接工藝
進行焊接操作的主要部件是焊接機頭。在管道全位置焊接中,為了保證焊接質(zhì)量,焊接機頭在進行焊接的過程中,要進行多個種類的復(fù)合式的運動,使焊槍保持特定的姿勢。但是焊接機頭會受到運動自由度的限制,不容易實現(xiàn)種類較多的復(fù)合式的運動。在這一過程中,合理控制焊接工藝的參數(shù)尤為重要,通常采用分段的形式進行工藝參數(shù)的確定。在全自動的焊接過程中,生產(chǎn)工人要將焊接機頭和焊槍的位置進行適當(dāng)?shù)恼{(diào)整,但是缺點是對于相對成熟的焊接工藝,再現(xiàn)性差,繼承性差。
2 全位置焊中自動焊接設(shè)備技術(shù)的性能分析
2.1 開發(fā)技術(shù)路線
現(xiàn)階段,焊接機頭和導(dǎo)軌組合的方式已經(jīng)在世界范圍內(nèi)很多國家的野外管道位置自動焊接中得以應(yīng)用,采用往復(fù)運動形式控制焊槍。自動焊接設(shè)備的研制,主要關(guān)注焊接和工藝的優(yōu)化以及實現(xiàn),只有保證焊接工藝參數(shù)的合理化,才有可能保證焊接質(zhì)量。所以,為了保證焊接質(zhì)量,通常對于同一操作內(nèi)容,存儲了多套焊接工藝。一些焊接操作會對焊接質(zhì)量產(chǎn)生直接的影響,但是技術(shù)人員卻沒有對其進行認真研究,自動焊接設(shè)備是一類機電一體化的設(shè)備,要從機、電、控制以及焊接等多個角度、多個方面展開分析,進行調(diào)節(jié)。伴隨著移動存儲設(shè)備應(yīng)用范圍的不斷拓展,在其中存儲大量的工藝程序已經(jīng)不再有意義,沒有較強的實用性。可以通過在光盤上存儲焊接工藝的方式,再通過計算機進行數(shù)據(jù)的傳輸,將數(shù)據(jù)傳遞到自動焊接設(shè)備上,再由設(shè)備完成存儲。在移動存儲設(shè)備的使用過程當(dāng)中,將存儲設(shè)備中節(jié)約得到的空間再進行有效的利用,可以編制更多數(shù)量的控制程序,進行全自動焊的過程中,對焊縫進行全面的控制,以解決管道全位置的自動焊質(zhì)量。
免責(zé)聲明
本文章部分轉(zhuǎn)載的文字源于互聯(lián)網(wǎng),轉(zhuǎn)載此文是出于傳遞更多信息和非商業(yè)性教育科研目的,版權(quán)歸原作者所有、若有來源標(biāo)注錯誤或原作者不同意轉(zhuǎn)摘的,請作者持權(quán)屬證明與其聯(lián)系,我們將及時更正、刪除,謝謝!
聯(lián)系人:熊經(jīng)理、姜經(jīng)理
電話:+86-22-23889667
手機:+86 13820221715
+86 13194693183
版權(quán)所有:COPYRIGHT ? 2016-2025 一新管道 ALL RIGHTS RESERVED (本網(wǎng)素材部分來源于網(wǎng)絡(luò),版權(quán)歸原作者所有,僅供參考,如有侵權(quán),請聯(lián)系我們刪除)
技術(shù)支持:君遠科技
備案號:津ICP備19006103號-1 津公網(wǎng)安備 12011102000678號
地址:天津市西青開發(fā)區(qū)賽達四支路28號模具園B4
 中文
中文
 English
English